Probability#
Probability Theory
Bayesian vs Frequentist
Random Variables
Discrete vs Continous Variables
PMF and PDF
Expected Value
Measures of Central Tendency: Varaince, STD
Covariance and Correlation
Conditional Probability
Bayes Rule
Central Limit Theorem
Distributions: Gaussian, Exponential, Poisson, Bionomial
Information Theory
Entropy, KL divergence
Probability#
Definition \( P(H) = \dfrac{\text{Number of Outcomes of the event}}{\text{Total events in the Sample Space}} \)
\( P(HH) = \dfrac{1}{4} \) Sample Space {HH,HT,TT,TH}
Independent Observations: Probability can be multiplied
Drawing 3 heads in a row P(HHH) = \( \dfrac{1}{2*2*2} \) = \( \dfrac{1}{8} \)
Combinatorics:
Number of ways of choosing k items from n elements \( \binom{n}{k} \)
import numpy as np
import scipy as sp
import matplotlib.pyplot as plt
import seaborn as sns
from PIL import Image
import requests
---------------------------------------------------------------------------
ModuleNotFoundError Traceback (most recent call last)
Cell In[1], line 4
2 import scipy as sp
3 import matplotlib.pyplot as plt
----> 4 import seaborn as sns
5 from PIL import Image
6 import requests
ModuleNotFoundError: No module named 'seaborn'
Consider a scenario where you have a fair coin and flip it 10 times. How would you calculate the probability of getting exactly 6 heads?
# python implementation
import math
def n_choose_k(n:int, k:int):
return math.factorial(n) // (math.factorial(n-k) * math.factorial(k))
n_choose_k(10,6)
210
n_choose_k(10,6) / 2 ** 10
0.205078125
Expected Value#
Expected value (or mean) of a random variable is a measure of the central tendency of its distribution. It provides a weighted average of all possible values that the random variable can take, with weights corresponding to their probabilities
\( E(X) = \sum_{i} x_i \cdot P(x_i) \)
values = [1,2,3]
probs = [0.1,0.4,0.5]
expected_value = sum([v * p for v, p in zip(values, probs)])
print(expected_value)
2.4
def create_coin_flip(n: int, p: float, size: int):
return np.random.binomial(n,p,size)
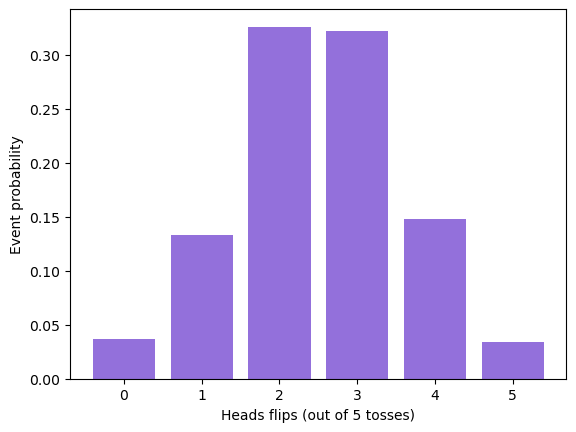
# 5-coin flip, fair coin, 1000 runs
# random variable: number of heads in a 5-coin flip (iid)
experiment = create_coin_flip(5, 0.5, 1000)
# get outcomes for each head
heads, event_count = np.unique(experiment, return_counts=True)
event_proba = event_count / 1000
event_proba
array([0.037, 0.133, 0.326, 0.322, 0.148, 0.034])
plt.bar(heads, event_proba, color='mediumpurple')
plt.xlabel('Heads flips (out of 5 tosses)')
_ = plt.ylabel('Event probability')
Mean, Median, Mode#
np.sum(experiment) / 1000
2.513
experiment.sort()
(experiment[499] + experiment[500]) / 2
3.0
sp.stats.mode(experiment)
ModeResult(mode=2, count=326)
The mean is heavily influenced by outliers or extreme values
In skewed distributions (where the data is not symmetrically distributed), the mean may not be representative of the “typical” value.
The median is not affected by outliers. For instance, if you have a dataset of salaries with one extremely high salary, the median will not change significantly, making it a robust measure of central tendency.
A dataset can have multiple modes.
Mean is preferred in normally distributed data and when performing further statistical analyses.
Median is preferred for skewed distributions and when dealing with outliers.
Mode is useful for categorical data and understanding the most common value.
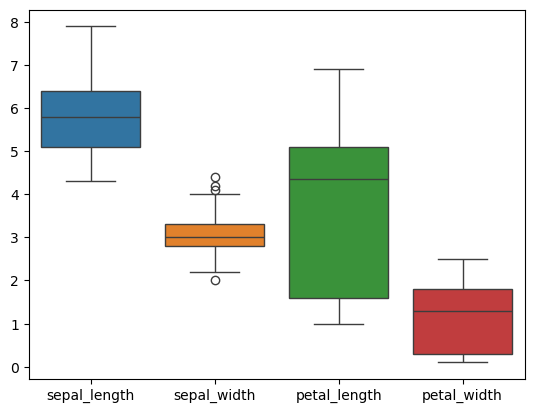
Box and Whisker Plot#
A graphical representation of a dataset that displays its distribution, central tendency, and variability. It’s particularly useful for visualizing the spread and symmetry of the data and for identifying outliers.
Interquartile range (Q3-Q1):
Q1 (First Quartile): The median of the lower half of the dataset (excluding the median if the number of data points is odd).
Q3 (Third Quartile): The median of the upper half of the dataset (excluding the median if the number of data points is odd).
Whisker Low: Extends from Q1 to the minimum value within 1.5 times the IQR below Q1.
Whisker High: Extends from Q3 to the maximum value within 1.5 times the IQR above Q3.
iris = sns.load_dataset('iris')
iris.head()
| sepal_length | sepal_width | petal_length | petal_width | species | |
|---|---|---|---|---|---|
| 0 | 5.1 | 3.5 | 1.4 | 0.2 | setosa |
| 1 | 4.9 | 3.0 | 1.4 | 0.2 | setosa |
| 2 | 4.7 | 3.2 | 1.3 | 0.2 | setosa |
| 3 | 4.6 | 3.1 | 1.5 | 0.2 | setosa |
| 4 | 5.0 | 3.6 | 1.4 | 0.2 | setosa |
_ = sns.boxplot(data=iris)
Variance, Standard deviation#
Variance measures the average squared deviation of each data point from the mean.
Variance: \( \sigma^2 = \frac{1}{n} \sum_{i=1}^{n} (x_i - \mu)^2 \)
Standard deviation: \( \sigma = \sqrt{\sigma^2}\)
data = np.random.randint(5,size=100)
np.var(data)
2.1164
np.mean((data - np.mean(data))**2)
2.1164
np.sqrt(np.var(data))
1.4547852075134666
np.std(data)
1.4547852075134666
Both variance and standard deviation are sensitive to outliers. Outliers can significantly increase the variance and standard deviation because they contribute large squared deviations from the mean. This sensitivity makes variance and standard deviation less robust in the presence of extreme values.
When calculating variance for a sample rather than an entire population, you need to use Bessel’s correction. This involves dividing by n-1 instead of n.
If random variables are independent, the variance of their sum is the sum of their variances. $\( \text{Var}(X + Y) = \text{Var}(X) + \text{Var}(Y) \)$
Adding a constant to every point in data does not change variance, multiplying it by a constant scales it by constant ** 2.
add_constant = 5
mul_constant = 3
# Adding a constant
data_added = data + add_constant
variance_added = np.var(data_added)
np.var(data) == variance_added
True
# multiplying by a constant
data_added = data * mul_constant
variance_mul = np.var(data_added)
variance_mul == np.var(data) * (mul_constant ** 2)
True
68-95-99.7 Rule: In a normal distribution, about 68% of data falls within one standard deviation of the mean, 95% within two, and 99.7% within three.
Standard deviation measures investment risk or volatility. A higher standard deviation indicates greater risk.
Correlation and Covariance#
Covariance denotes how two variables are related to each other $\( Cov(X, Y) = \frac{1}{n} \sum_{i=1}^{n} (X_i - \bar{X})(Y_i - \bar{Y}) \)$
Positive Covariance implies as one variable increases the other also increases
Correlation is a normalized covariance. Ranges between [-1, 1]. $\( \rho(X, Y) = \frac{\text{Cov}(X, Y)}{\sigma_X \sigma_Y} \)$
x = np.random.randint(5,size=10)
y = np.random.randint(5,size=10)
np.mean((x - np.mean(x)) * (y - np.mean(y)))
0.3
np.cov(x,y)
array([[2.66666667, 0.33333333],
[0.33333333, 1.56666667]])
np.cov(x,y)[0,1]
0.3333333333333333
np.mean((x - np.mean(x)) * (y - np.mean(y))) / (np.std(x) * np.std(y))
0.16308201826336052
np.corrcoef(x, y)[0,1]
0.16308201826336055
Some points:
Covariance is sensitive to the scale of the variables. However, correlation is scale-invariant since it’s normalized by the standard deviations.
Correlation Does Not Imply Causation
Zero correlation does not necessarily mean the variables are independent, there could still be a non-linear relationship between them.
Outliers can significantly impact both covariance and correlation.
Pearson vs Spearman: Pearson measures linear relationship, Spearman measures monotonic realtionships.
Highly correlated variables can impact the model performance, hence this becomes an important topic in machine learning and statistics.
Covariance is symmetric
data = np.random.randn(5, 3)
cov_matrix = np.cov(data, rowvar=False)
is_symmetric = np.allclose(cov_matrix, cov_matrix.T)
is_symmetric
True
Connecting the dots:
Correlation analysis can be used in feature selection
PCA relies on covariance matrix to transform features in such a way that the variance is maximized.
Regularization methods can be used to reduce the multicollinear features
Cross-correlation features can be used in time series analysis.
In neural networks, the covariance of the input is adjusted by techniques like Batch Normalization, Dropout to stabilze learning and reduce overfitting.
Distributions in Probability#
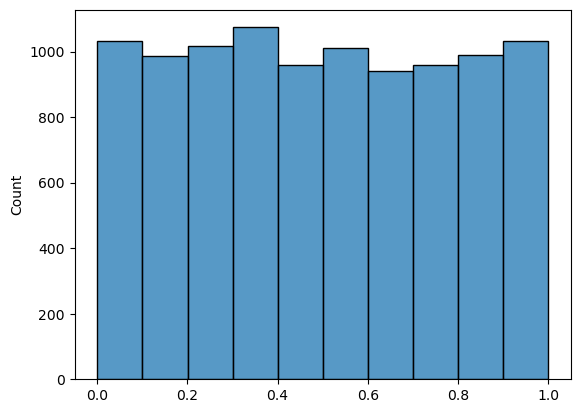
Unifrom Distribution#
Rolling a Fair Die
Random Number Generation
Shuffling a Deck of Cards
Choosing a Random Day of the Week
Random Selection of IP Addresses
Randomized Control Trials (RCTs) in Experiments
Load Balancing in Networks
Monte Carlo Simulations
Randomized A/B Testing
Random Employee Surveys
Out of all distributions, uniform distribution has maximum entropy.
Some of the ML models use uniform distribution to select initial point.
Uniform(low=a, high=b)
Mean
\( \mu = \frac{a + b}{2} \)
Variance
\( \sigma^2 = \frac{(b - a)^2}{12} \)
This shows that even though all values are equally likely, the central tendency and spread of the distribution can still be calculated and provide insights into the data.
data = np.random.uniform(low=0,high=1,size=10000)
sns.histplot(data,bins=10)
<Axes: ylabel='Count'>
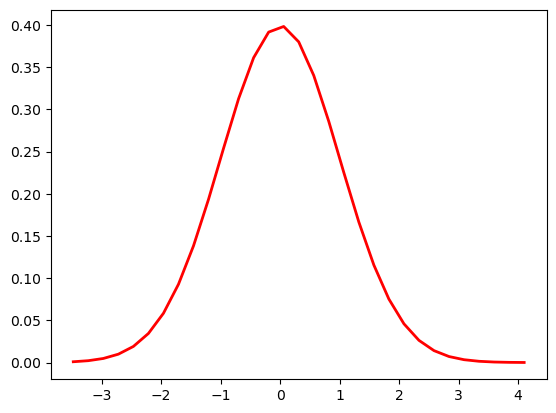
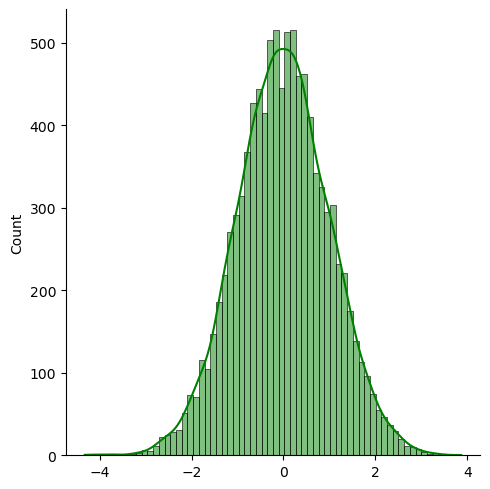
Gaussian Distribution#
Continuous probability distribution characterized by its bell-shaped curve
Symmetric around the mean
Defined by mean and variance
PDF $\( f(x) = \frac{1}{\sigma \sqrt{2\pi}} \exp\left(-\frac{(x - \mu)^2}{2\sigma^2}\right) \)$
Mean, Median and Mode are equal.
mu = 0
sigma = 1
data = np.random.normal(mu, sigma, 1000)
count, bins, ignored = plt.hist(data, 30, density=True, alpha=0.6, color='g')
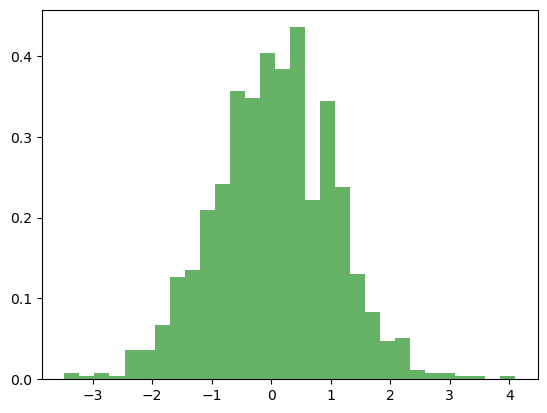
plt.plot(bins, 1/(sigma * np.sqrt(2 * np.pi)) * np.exp( - (bins - mu)**2 / (2 * sigma**2) ), linewidth=2, color='r')
[<matplotlib.lines.Line2D at 0x7fc08bfe0e00>]
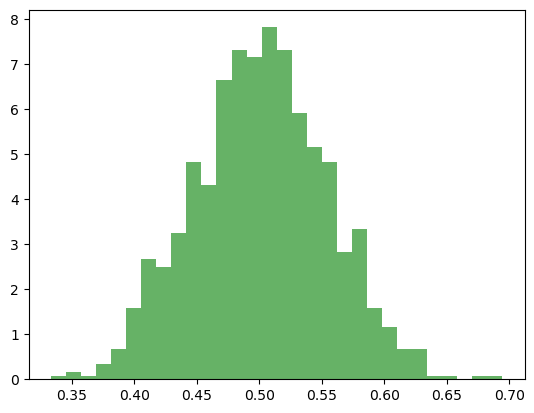
Foundational in ML and statistics because of central limit theorem.
Regardless of the underlying distribution, samples drawn randomly from it will follow a normal distribution.
Thanks to CLT, we can do A/B testing in different populations even though we don’t have any idea on how the underlying distriubtions are distributed like.
# Set the number of experiments and sample size
n_experiments = 1000 # Number of experiments (trials)
sample_size = 30 # Sample size
uniform_data = np.random.uniform(0, 1, 10000)
# even though the underlying distribution is uniform, samples drawn from it will look like Gaussian
sample_means = []
# Perform experiments
for _ in range(n_experiments):
# Take a random sample of 'sample_size' from the uniform data
sample = np.random.choice(uniform_data, sample_size)
# Calculate the mean of the sample
sample_mean = np.mean(sample)
# Store the sample mean
sample_means.append(sample_mean)
count, bins, ignored = plt.hist(sample_means, bins=30, density=True, alpha=0.6, color='g')
Many ML models assume data follows a normal distribution. For example, linear regression assumes erros are normally distributed.
In real world, sometimes it is incorrect to assume normal distribution. In those cases, we can apply some transformation or work with models which do not assume.
Among all distributions with mean and variance, Gaussian has most entropy or least information. So we assume a Gaussian distribution when we don’t have enough information about the underlying process.
Connecting the dots#
In Neural networks, the weights are initialized by using Gaussian (Xavier).
Data Augmentation: Gaussian Noise is added to inputs to ensure more robust training.
Variants of SGD rely on Gaussian noise to stabilize training and avoid getting struck in a local minima.
def xavier_init(shape):
fan_in, fan_out = shape
std_dev = np.sqrt(2 / (fan_in + fan_out))
return np.random.normal(0, std_dev, size=shape)
weight_shape = (784, 256) # Example for a layer with 784 inputs and 256 outputs
weights = xavier_init(weight_shape)
print(weights.shape)
(784, 256)
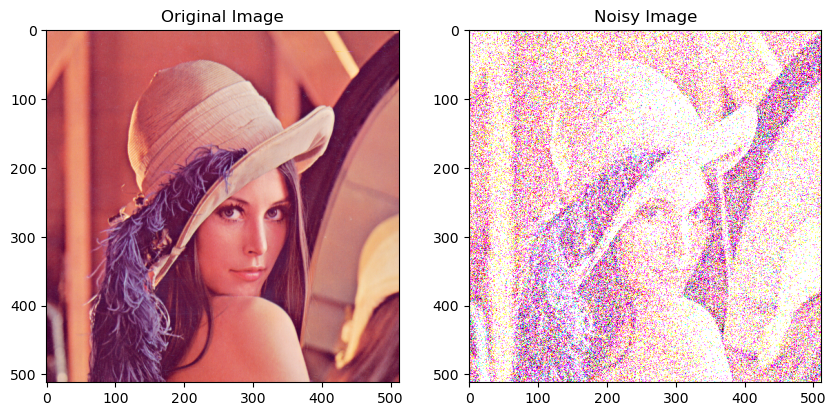
def add_gaussian_noise(image, mean=0, sigma=100):
"""
Add Gaussian noise to an image.
Args:
- image (np.ndarray): Input image.
- mean (float): Mean of the Gaussian noise.
- sigma (float): Standard deviation of the Gaussian noise.
Returns:
- np.ndarray: Noisy image.
"""
gaussian_noise = np.random.normal(mean, sigma, image.shape)
noisy_image = np.clip(image + gaussian_noise, 0, 255) # Assuming image pixel values are in [0, 255]
return noisy_image
A little diversion:
The same concept of adding small amounts of noise and reconstructing it from noisy image is used in latest diffusion models. I will probably implement it at a later stage, but it is so interesting.
# Example usage
image = Image.open(requests.get("https://upload.wikimedia.org/wikipedia/en/7/7d/Lenna_%28test_image%29.png", stream=True).raw)
image = np.array(image)
# image = np.ones((100, 100)) * 128 # Create a dummy image with a constant value
noisy_image = add_gaussian_noise(image)
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.title('Original Image')
plt.imshow(image, cmap='gray')
plt.subplot(1, 2, 2)
plt.title('Noisy Image')
plt.imshow(noisy_image, cmap='gray')
plt.show()
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Examples#
Return on Investment on Stocks and Bonds: Can be assumed as Gaussian with mean and variance
Product Dimensions
Noise in Signals
Measurements like BMI, Blood Glucose etc.
Naive Bayes assumes data is Gaussian
Measurement Errors
Modelling customer behavior
Log-Normal Distribution#
Natural Logarithm of log-normal distribution is normally distributed.
Skewed to the right, not symmetric
Less sensitive to outliers
Examples:
Income distributions: Sometimes, it helps to normalize log-normal distributions by applying a logarithm to improve model performance.
Modelling stock prices
x = np.random.lognormal(size=10000)
sns.displot(x,kde=True)
<seaborn.axisgrid.FacetGrid at 0x7f9c6425f230>
sns.displot(np.log(x), color='green', kde=True)
<seaborn.axisgrid.FacetGrid at 0x7f9c1da93230>
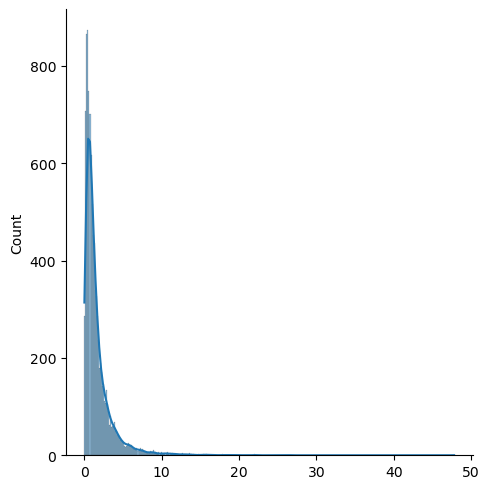
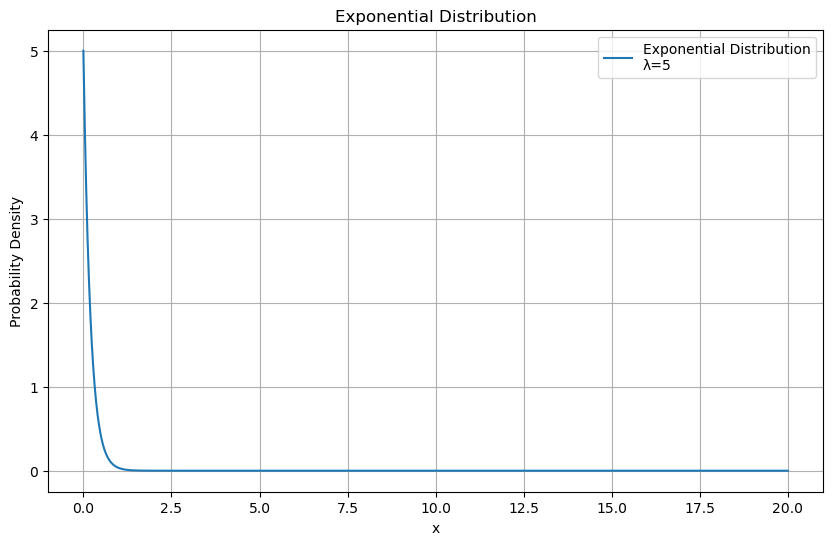
Exponential Distribution#
The Exponential Distribution is another important distribution and is typically used to model times between events or arrivals $\( f(x; \lambda) = \lambda e^{-\lambda x} \)\( \)\( \mu = \frac{1}{\lambda} \)\( \)\( \sigma = \frac{1}{\lambda^2} \)$
Commonly used in Survival analysis
x = np.linspace(0, 20, 1000)
lambda_param = 5
pdf = sp.stats.expon.pdf(x, scale=1/lambda_param)
plt.figure(figsize=(10, 6))
plt.plot(x, pdf, label=f'Exponential Distribution\nλ={lambda_param}')
plt.title('Exponential Distribution')
plt.xlabel('x')
plt.ylabel('Probability Density')
plt.legend()
plt.grid(True)
plt.show()
Exponential distribution is memoryless. Events at time t are independent of events happened before it.
In survival analysis, often used in medical and reliability studies, the exponential distribution models the time until an event (such as death, failure, or system breakdown)
Poisson Distribution#
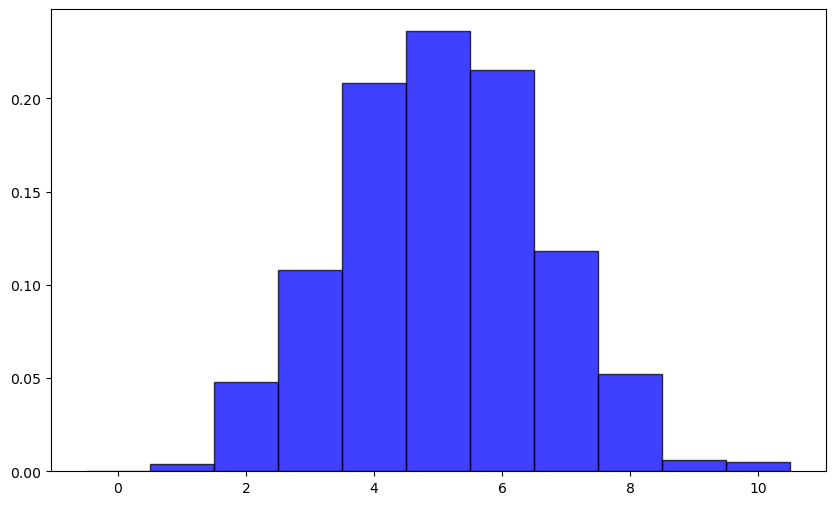
Bionomial Distribution#
Discrete Distribution
Number of trails (n), probability of success in each trail(p) $\( P(X = k) = \binom{n}{k} p^k (1 - p)^{n - k} \)$
experiment = np.random.binomial(n=10, p=0.5,size=1000)
# n * p = Expected value
np.mean(experiment)
5.072
# n * p * (1-p) = Variance
np.var(experiment)
2.506816
10 * 0.5 * 0.5
2.5
plt.figure(figsize=(10, 6))
plt.hist(experiment, bins=np.arange(-0.5, 10+1.5, 1),
density=True, alpha=0.75, color='blue', edgecolor='black')
(array([0. , 0.004, 0.048, 0.108, 0.208, 0.236, 0.215, 0.118, 0.052,
0.006, 0.005]),
array([-0.5, 0.5, 1.5, 2.5, 3.5, 4.5, 5.5, 6.5, 7.5, 8.5, 9.5,
10.5]),
<BarContainer object of 11 artists>)
Conditional Probability#
Conditional probability is a fundamental concept in probability theory that deals with the probability of an event occurring given that some other event has occurred $\( P(A|B) = \frac{P(A \cap B)}{P(B)} \)\( \)\( \)\( \)\( P(A\cup B\cup C) = P(A) + P(B) + P(C) - P(A \cap B) - P(A \cap C) - P(B \cap C) + P(A \cap B \cap C) \)\( \)\( P(A\cup B) = P(A) + P(B) - P(A \cap B) \)$
Reverse Computation:
Information Theory#
Entropy: Measure of uncertainity in a distribution
Shannon’s Entropy: Measures entropy of a discrete random variable $\( H(X) = - \sum_{x} p(x) \log_2 p(x) \)$
Conditional Entropy: Measure randomness of a variable given the values of another variable. $\( H(X|Y) = - \sum_{x,y} p(x,y) \log_2 p(x|y) \)\( \)\( H(X|Y) = H(X,Y) - H(Y) \)$
Mutual Information: Measure of imformation of one variable contains about another variable $\( I(X;Y) = H(X) + H(Y) - H(X,Y) \)$
KL divergence is the measure of difference between two probability distributions. $\( D(P||Q) = \sum_{x} p(x) \log_2 \frac{p(x)}{q(x)} \)$
def entropy(probs):
return -np.sum(probs * np.log2(probs))
probs = [0.5,0.5]
entropy(probs)
1.0
probs = [0.3,0.7]
entropy(probs)
0.8812908992306927
probs = [0.01,0.99]
entropy(probs)
0.08079313589591118
def joint_entropy(probs):
return -np.sum(probs * np.log2(probs))
joint_probs = [[0.25,0.25],[0.25,0.25]]
# Joint entropy of two fair coin flips
joint_entropy(joint_probs)
2.0
def conditional_entropy(probs, marginals):
return joint_entropy(probs) - entropy(marginals)
marginal_probabilities_y = np.array([0.5, 0.5])
conditional_entropy(joint_probs, marginal_probabilities_y)
1.0
def mutual_information(entropy_x, entropy_y, entropy_xy):
return entropy_x + entropy_y - entropy_xy
def kl_divergence(p,q):
return np.sum(p * np.log2(p/q))
p = np.array([0.4, 0.6])
q = np.array([0.5, 0.5])
kl_divergence(p,q)
0.029049405545331364
Entropy is used in building decision trees. Objective function minimizes entropy at each split.
KL divergence is used in autoencoders.
Mutual information can be used in feature selection.